欢迎来到华体会hth网站!专业生产:高频加热机,模块中频,高频炉,高频感应加热设备等,提供技术参数、工作原理、打样报价等服务。电话:13526576560 微信、QQ同号

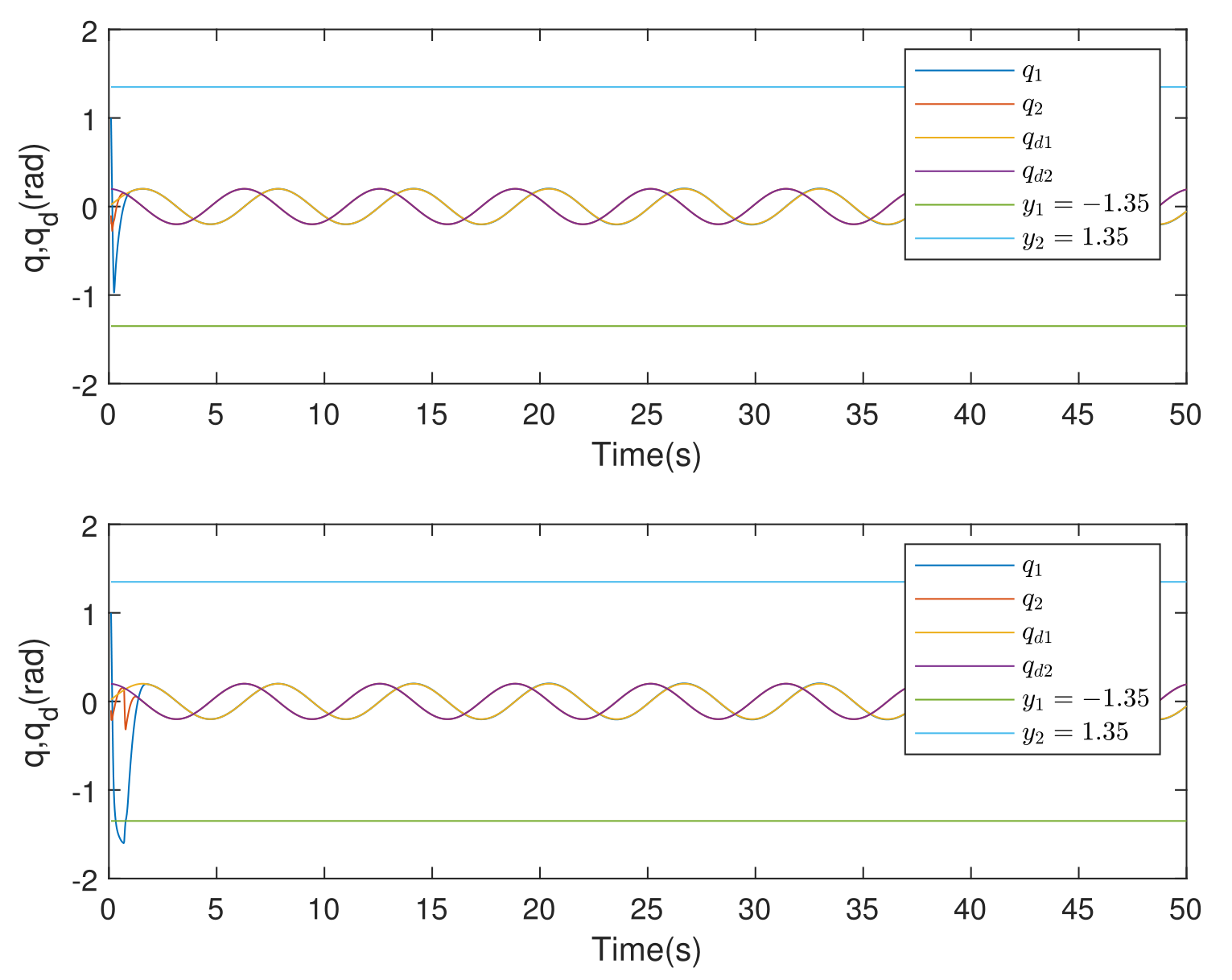
论文针对带有输出受限机器人体系提出了一种新的有限时刻自适应事情触发控制办法,将指令滤波反步控制与事情触发控制相结合,既保留了指令滤波反步控制的核算简洁、瞬态功能好等长处,一起又经过事情触发降低了通讯与资源损耗,使关节方位盯梢差错在有限时刻内收敛到希望的范畴。为了验证算法的优越性,论文以一个二连杆机械臂模型做验证,经过与不考虑输出受限的控制办法和仅满意指数收敛的反步办法做仿真比照发现,论文所提出的办法有着更好的收敛和稳态功能。
近年来,自动化学院致力于推动本科生和研讨生科研水平,赵林副教授地点的于金鹏教授团队,本着激起学生创造力的准则,对学生尽心辅导,取得了优异的效果,辅导本科生和研讨生在IEEE TNNLS、IEEE TFS、IEEE TCASII等高水平期刊宣布系列论文20余篇,学院本科生和研讨生科研水平出现杰出的发展势头。

