欢迎来到华体会hth网站!专业生产:高频加热机,模块中频,高频炉,高频感应加热设备等,提供技术参数、工作原理、打样报价等服务。电话:13526576560 微信、QQ同号

即功率因数校正,功率因数(PF)是指交流输入有功功率(P)与输入视在功率(S)的比值,即功率因数

式中, 表示交流输入市电的基波电流有效值; 表示交流输入市电电流的有效值; 表示交流输入市电电流的波形畸变因数;cos表示交流输入市电的基波电压和基波电流的相移因数。所以功率因数(PF)可以定义为交流输入市电电流的波形畸变因数与相移因数cos的乘积。
可见功率因数PF由电流失真系数和基波电压、基波电流相移因数cos决定。cos低,表示用电电器设备的无功功率大,电能利用率低。值低,则表示输入电流谐波分量大,将造成输入电流波形畸变,对电网造成污染,严重时,还会使用电设备损坏。
传统的功率因数概念是假定输入电流无谐波电流(即I1=Irms或=1)的条件下得到的,这样功率因数的定义就变成了PF=cos。
理想情况下,功率因数PF=cos×=1,但通常PF都小于1。功率因数校正的作用,就是使电路的功率因数PF达到或者接近于1。这能够最终靠两个途径达到:
⑴使输入电压、输入电流同相位。此时cos=1,所以PF=。
⑵使输入电流正弦化。即 = (谐波为零),有 / =1即;PF=cos×=1。
从而实现功率因数校正。利用功率因数校正技术能使交流输入电流的波形完全跟踪交流输入电压波形,使输入电流波形呈纯正弦波,并且和输入电压同相位,此时整流器的负载可等效为纯电阻。
在实际电路中,往往把PFC电路设置在桥式整流输出至滤波电路之间。这时基准电压是m型半波波形,经PFC电路跟踪处理后的输入电流波形也是m型半波波形,但只要满足了输入电流的波形与输入电压(基准电压)的波形同频同相,就达到了功率因数校正的目的。
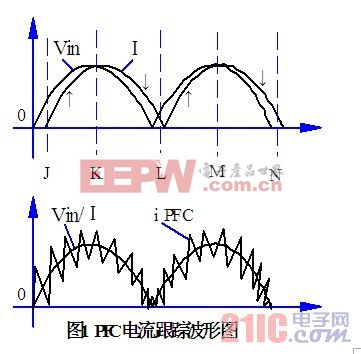
图1所示为电流跟踪波形图。为便于说明问题,图中电压Vin的波形与电流I的波形的纵轴采用了不同比例,以使它们能够重合。
⑴图1中若以电压Vin的波形为基准,则电流I的波形错开了一定距离,即产生了相位差。观察V、I波形图不难发现,只要将虚线J-K、L-M之间的电流波形的幅度依照电压波形适当提升,而将虚线K-L、M-N之间的电流波形的幅度依照电压波形适当压缩,即可使电流波形与电压波形重合。
根据同样原理,即便电流波形是方波等非正弦波,也可以整形为正弦波,并与电压波形重合。
实际上,在功率因数校正时,输入市电电压的波形和相位的采样是必需的,而可以不必对输入电流的波形进行采样,无论输入电流的波形如何,只要按照输入市电的波形和相位改造出所需的电流波形,就能轻松实现功率因数控制的目。所以在本书的实际电路中,通常并不对输入电流进行采样,使电路的设计更加灵活。
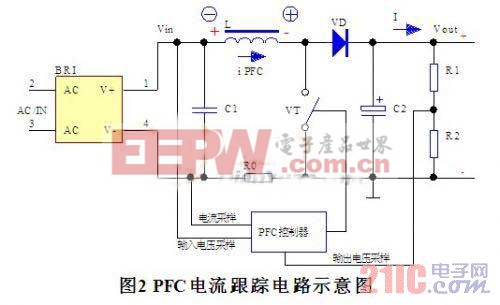
图中BRI为市电输入桥式全波整流器,L为PFC电感,VD为PFC二极管,C1为市电滤波电容,VT为PFC功率管,R0为市电电流采样电阻,PFC控制电路输入的市电电流采样电压为负值,R1、R2为直流电压采样电阻。PFC控制电路通过对市电输入电压、直流输出电压和电路电流采样值的分析,输出控制信号,控制PFC功率管的占空比,进而达到校正电路PFC的目的。
由图可见,PFC的采样及控制电路设置在整流器BRI与滤波电容C1之间,这时PFC电路处理的波形为m型半波波形。若将PFC电路设置在滤波电容C2之后,这时电压电流已经是直流,失去校正的意义。
图中VT为PFC开关管,它的开通与截止受PFC控制器的控制。这一电路具有以下功能:
当VT饱和导通时,相当于将L右端接地,这时将有较大电流流iPFC过L,但由于L的电感特性,iPFC只能逐渐增大。随后VT截止关闭,电感L中的能量维持iPFC电流继续流动,经VD对C1充电,并供给负载,使iPFC逐渐减小。受PFC控制电路的控制,PFC开关管不断反复开、闭,在负载两端生成输出电压。
如果PFC开关管VT导通时间比较久,L中电流比较大,L中积蓄的能量较多,则当VT截止时L中维持的电流就较大。反之,若VT导通时间较短,则L中积蓄的能量就较少,当VT截止时L维持的电流也较小。可见控制VT开通时间的长短,即可控制电路中电流的大小,所以只要按照输入电压的规律来控制PFC开关管的开通与截止,就可以使输入电流与输入电压很好的同频同相,提高电路的输入功率因数。
当VT开通时,L两端的电压极性为左正右负。此时VD正端为低,处于截止状态,C2两端的电压不会经VT泻放。而当VT截止时,L两端电压极性反转,为左负右正,此时L两端的感生电压与整流器的输出电压相串联,通过VD对C1充电。结果C1两端的电压高于整流器输出的电压。因此这种结构的PFC电路具有升压功能。
由于能够最终靠控制PFC功率管栅极的占空比来控制整流器输出的电压,所以能通过对输出电压的采样,来调整PFC功率管栅极的占空比,进而达到稳定输出电压的目的。因此,在具有升压结构的高频机中,在升压的同时就完成了功率因数的校正。
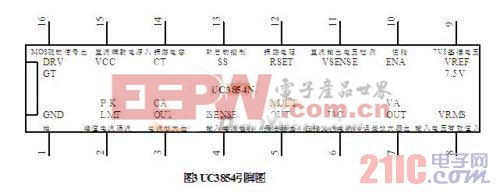
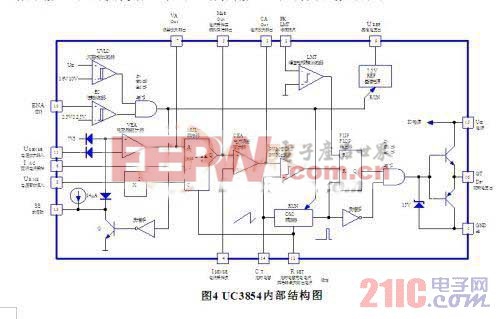
UC3854是TI公司生产的用于有源功率因数校正的专用控制电路。它能够实现升压变换器校正功率因数所需的全部控制功能,使功率因数达到0.99以上,使输入电流波形失线%。该控制器采用平均电流型控制方式,控制精度很高,开关噪声较低。采用UC3854组成的功率因数校正电路后,当输入电压在85~260V之间变化时,输出电压仍可以稳定在设定值,因此也可当作稳压电源
UC3854的输出级采用推拉输电路,输出电流可达1A以上,因此输出的恒频PWM脉冲可以推动大功率MOSFET器件。
芯片内部所有电压的测试基准点。振荡器定时电容的放电电流也由该脚返回,因此,定时电容到该引脚的距离应尽可能短。
峰值限流门限值为0V。该引脚应接入电流取样的负值电压,一旦该脚电压为0,芯片的输出即被关闭。通常在芯片的○2脚与○9脚(基准电压输出端)之间接一只偏置电阻,使○2脚得到一个正偏置电压。若电流取样电阻上的负电压大到足够抵消该偏置电压时,○2脚电压即为0V,芯片即被关闭。
该电流误差放大器检测并放大市电输入电流,控制脉宽调制器,强制校正市电输入电流。
○9VREF该脚可输出7.5V稳定电压,最大输出电流为10mA,并且内部可以限流。当Vcc较低或者使能端○10脚(ENA)为低电平时,该脚电压为0。
使芯片启动工作的控制信号的输入端。该端还控制基准电压、振荡器和软启动电路的打开与关闭。若不通过该脚控制时,该脚应接至+5V电源或经100K电阻接至Vcc电源,使芯片始终处于工作出状态。
PFC电路的输出电压经分压后加至该脚。通常该脚与电压误差放大器输出端○7脚(AV OUT)之间需加入RC补偿网络,以改善电压误差放大器的频率特性。
○12RSET振荡器定时电容充电电流设定电阻接入端和乘法器最大输出电流设定电阻接入端。乘法器最大输出电流为3.75V/RSET。
芯片停止工作或Vcc过低时,该脚为0电压。芯片开始启动时,内部14A电流对外接电容充电,使该脚电压上升至7.5V时,芯片输出的PWM脉冲占空比逐渐增大,输出电压逐渐升高。
为了保证芯片的正常工作,Vcc应高于17V,同时该引脚对地之间应接入旁路电容器。
该脚的输出电压驱动外接的MOSFET功率管。该引脚内部设有箝位电路,可将输出脉冲幅值钳位在15V,因此当Vcc高达35V时,该芯片仍能正常工作。使用中该引脚到MOSFET管的栅极之间应串入大于5的电阻,以免驱动电流过冲。
UC3854中设有欠压控制电路。其中UVIC为欠压封锁电路。开机时,Vcc电压高于16V,UVIC输出为高电平,否则UVIC输出为低电平。UC3854开机工作后,若Vcc低于10V,UVIC即输出低电平。
EC为使能比较器。UC854○10脚电压高于2.5V时,芯片启动,低于2.25V时芯片关闭。UVIC输出端和EC输出端分别接至与门1的输入端,而与门1的输出端控制着7.5V基准电压发生器、OSC振荡器和软启动电路。只有芯片的电源电压Vcc高于16V,同时○10脚使能端高于2.25V时,与门1输出为高电平,7.5V基准电压发生器、OSC振荡器和软启动电路开通工作,若Vcc低于10V,或者○10脚使能端低于2.25V,上述3个电路立即关闭,芯片随之关闭。
乘法器是UC3854的核心电路,它的输入端接收市电输入电压有效值和整流器输出的直流电压的信息,输出信号送入CEA电流误差放大器。乘法器的输出电压决定了电路功率因数的高低。
电路的输出电压信号经UC3854○11脚送入VEA电压误差放大器的反相输入端,其中的二极管用来描述有关电路的特性而非实际的元件。电压误差放大器输出信号的极性与电路输出电压信号极性相反,即电路输出电压升高时电压误差放大器的输出信号会降低,反之会升高。电压误差放大器输出的信号送至乘法器的A端,因此A信号代表了电路输出电压,同时由○7端输出。通常在电压误差放大器的反相输入端与输出端,即UC3854的○11脚与○7脚之间接有RC网络,用以改善放大器的频率特性和调整放大器的放大倍数。
市电输入电压信号经○6脚送至乘法器的B端,因此B信号代表了市电输入电压。同时市电输入电压信号还经○8脚送至芯片内的平方电路,经平方处理后送至乘法器的C端,因此C信号代表了市电输入信号X的平方值。
在乘法器中,代表电路输出电压的A信号与代表输入电压信号的B信号相乘,再除以代表市电信号平方值的C信号,得到Im信号。即其中之所以要用A×B除以C,是不希望功率因数校正值随输入电压的幅度变动而发生明显的变化,这是UC3854开发商的一项专利技术。
乘法器输出的Im信号作为控制电流参考信号送入电流误差放大器的同相输入端。与此同时,市电输入电流信号经○4脚送至电流误差放大器的反相输入端。于是,电流误差放大器的输出信号便与市电输入电流信号具有相反的极性。
振荡器的输出为同频率的锯齿波和方波,其中锯齿波送至PWM比较器的同相输入端,而方波的一路送至触发器的置位端S端,另一路送至反相器2的输入端。
输出电流信号加至比较器的反相输入端,比较器的输出信号加至触发器的一个复位端R端。当输出电流发生峰值过流时,比较器输出低电平,迫使触发器停止工作。
PWM脉宽调制电路由PWM比较器构成。锯齿波被送至PWM比较器的同相输入端,电流误差放大器输出的信号被送至PWM比较器的反相输入端,PWM脉宽调制电路便可输出连续的PWM调制脉冲。PWM脉宽调制电路输出的PWM脉冲送至触发电路的一个复位端R端。
振荡器输出的方波脉冲信号加至触发器电路的置位端S端,PWM脉宽调制电路输出的PWM信号加到触发器电路的复位端R端,在两个输入信号的共同作用下,触发器输出端Q端将输出一连串频率与锯齿波相同,宽度与PWM脉宽调制电路输出信号的脉宽相同的信号,与门2在触发器Q端输出的脉冲信号和反向器输出的反极性方波信号共同作用下,输出宽度受控的PWM信号,再经UC3854内部的推拉输出级进行功率放大后从○16脚输出。
①该脉冲被输入市电频率和幅度所调制,经PFC功率管控制后,能使输入电流的波形紧跟输入电压的波形变化,进而达到提高输入电路的功率因数的目的。
②该脉冲的宽度同时受控于输入市电电压信号和整流电路输出电压信号的调制,在提高电路的功率因数的同时,还能使整流器输出的直流电压具有升压和稳压的特性。
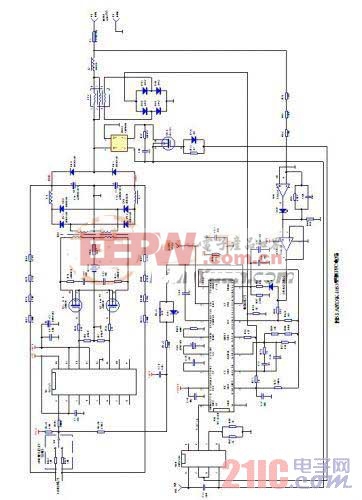
⒈市电相电压经R71、R83、R82降压后加至运放U9C(LM324)反向输入端。U9C与D39组成精密检波器,对降压后的市电电压进行检波,形成市电检测电压,其波形为m状半波波形。采用精密检波器可以使小信号时的检波线性度良好。市电检测电压再经跟随器U9A(LM324)隔离后送入U11(UC3854)的○6、○8脚。
⒉市电输入电流流经CT2后在○1、○4脚感应出交流电压,经D41、D42、D45、D46全波整流后形成输入电流检测电压,加至U11(UC3854)的○2、○5脚。此电路的作用是,一旦输入电流过流,PFC芯片即停止工作。要注意加至U11○2、○5脚的电压为全波整流器输出的负值电压。
⒊来自电脑芯片U6○57脚的启动电压加至U11的○10脚,高电平为启动,低电平为关闭。
⒋U11的○16脚输出PWM驱动信号,经光耦U10(OPT250-1)隔离驱动后从其○6、○7脚输出,加至PFC功率管Q14的栅极。在栅极中串接了由R52、D36组成的加速、消振电路。其中R52为消振电阻,将栅极可能会产生的自激振荡消耗掉;D36为加速二极管。当正极性驱动信号到来时D36截止,对电路无影响;当负极性驱动信号到来时,D36导通,将R52旁路,使Q14栅极的电荷能迅速放掉。
⒌BUS电压的检测电压经BUS电压切换开关SW、R120、R122、R123、C74、D43等隔离整形后加至U11的○7脚,作为BUS误差校正电压。C66加至U11的○7、○11脚之间,作为U11内部电压误差放大器的频率补偿电容,以改善其频率特性。
逆变状态时U1通过BUS电压切换开关SW取得BUS电压的幅度信息,控制输出的PWM脉冲的占空比,实现BUS电压的稳定。市电状态时虽然逆变电路已停止工作,但BUS电压切换开SW关仍处于工作状态,可将BUS电压的幅度信息送入PFC电路U11中。
这样一来,当电路工作于市电状态时,U11内部乘法器的输入端就有两路检测信号输入:一路是精密检波器U9C、U9A经○6、○8脚送来的市电检测电压;另一路是由电压切换开关SW经○7脚送来的BUS检测电压,U11对这两路信号处理后,从○16脚输出PWM信号,控制PFC功率管Q14的占空比,同时实现功率因数的校正、BUS电压的升压和稳压。
⒍如前所述,通常PFC电路设置在全波整流器与滤波电容之间,处理的是m型半波电压。而在SANTAK-1053型高频机中,PFC电路设置在市电输入与全波整流电路之间,处理的是正弦电压,并且在功率管与市电输入控制点之间接有一只作极性校正用的整流REC1,这种结构显然与通常的PFC电路不同。
按照通常的PFC电路的设置,PFC电路不便产生正、负极性的BUS电压。而在SANTAK-1053型高频机中,将PFC电路设置在市电输入与全波整流电路之间,同时在功率管与市电输入控制点之间接一只极性校正用整流桥,使这一问题便得到了解决。
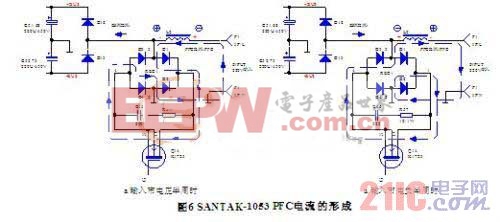
图6为SANTAK-1053型高频机PFC电流的形成图。当市电为正半周时,市电流经D1、D4、Q14/D、Q14S形成回路。当市电为负半周时,市电流经D2、D3、Q14/D、Q14S形成回路。因此,无论在市电的正半周还是负半周,都有PFC电流流经Q14,并且都是从D极流进,S极流出。这样,这种PFC电路处理的就是全波电压,可以很方便的得到正负对称的BUS电压。
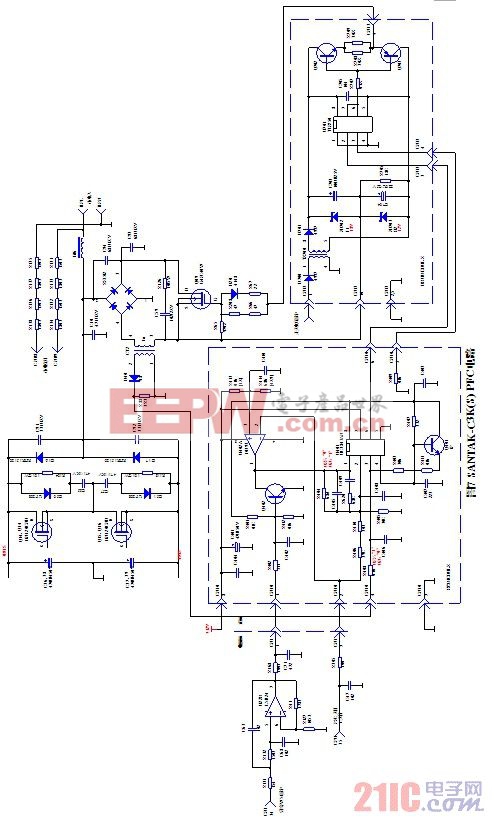
⑴在SANTAK-C3K(S)机中,PFC的控制电路中没用常见的PFC芯片如UC3854等,而是采用了常见的开关电源PWM芯片UC3843。
⑵在SANTAK-C3K(S)机中,PFC控制管电路的基本结构是相似的,只是因为输出功率较大,PFC控制管Q09采用了IGBT管,但是PFC信号电路却迥然不同。
⑶在SANTAK-C3K(S)机中,将PFC的主要电路制作在两块小电路板上,并垂直插焊在主电路板上。
参见图7所示。PFC电路的作用是根据市电和BUS电压的幅度变化,产生相应的控制脉冲,通过PFC功率管调整市电输入电流(市电工作时)的和BUS电压(电池工作时)的大小。
CPU根据检测到的市电输入电压和输入电流以及BUS电压的数据,从○34脚输出相应的方波脉冲串,脉冲串中的脉冲宽度是变化的,代表了CPU的控制信息。但后面的PFC控制电路却不能直接处理幅度恒定宽度(周期)变化的电压波形,必须将其转换为幅度变化的电压波形。为此,将CPU○34脚输出的脉冲串加至由U22B及周边元件构成的二阶滤波器,从二阶滤波器出来后就变成了正弦波信号,它的幅度变化代表了CPU的控制信息。
PFC小板由U401、U402,Q401、Q402及周边元件组成,见图7左下所示。
二阶滤波器输出的信号经接插件CN1/1,CN10/1加至三极管Q402的基极,Q402基极接有由R401、R412组成的分压器,将+5V电压分出约0.5V给Q402基极,所以二阶滤波器输出的电压超过0.5V时Q402即饱和,将U401○1脚接地,于是U401关闭,输出端○6脚所接的PFC功率管也关闭。当二阶滤波器输出的电压低于0.5V时,Q402截止,U401开通,输出端○6脚所接的PFC功率管也开通。二阶滤波器输出电压幅度变化时,U401开通的时间也随之变化。
由上述过程可见,CPU输出脉冲宽度的变化,在二阶滤波器中变成了幅度的变化,经过U401以后,又变成了PFC功率管开通于截止的时间的变化,实现了CPU对PFC功率管的控制。
PFC功率管流过的瞬时电流与市电的输入电流属于同一数量级,一旦失控,将造成电路器件的损坏。为此设置了PFC过流保护电路。
PFC过流保护电路由PFC过流检测传感器CT2及周边元件组成。CT2初级串接在PFC功率电路中,PFC电路工作时,次级感应出的电压经D24、R408、C406滤波加至U401○3脚,PFC电路若发生过流,U401即关闭。R88是负载电阻。D40整流后不经滤波,保留了波形中的突波部分,使保护更加灵敏。
当PFC电路需要关闭时,CPU○35脚输出高电平,经R305、接插件CN1/7、CN12/2、R406、R410加至U401○2脚,使U401关闭。与此同时,CPU○35脚送出的关闭信号还经R305送至比较器U402A的反相输入端○2脚,只要○2脚电压超过○3脚电压,U402A输出端○1脚即为低电平,使U401关闭。由于PFC电路采取了双重关闭措施,所以关闭十分可靠。
为了保证在占空比大于50%时开关电源能稳定工作,需要对电路进行斜坡补偿,其原理如前所述。本机斜坡补偿仍然采用的是将定时电容的充放电波形与电流采样电压波形相叠加的方法,参见图7所示。
图中Q401为斜坡补偿三极管。Q401发射极接至U401○8脚提供的+5V稳定电压。基极接至U401○4脚。Q401发射极经电阻R411、R403接至U401○3脚。显然,Q401接成射极输出器的形式,将C401的充放电波形送入Q401基极,与功率管送入U401○3脚的电流采样电压相叠加。于是,两条曲线相叠加后的幅度大幅度提升,整个曲线的斜坡坡度增大。补偿前接近触发电平的斜坡曲线是平缓的,补偿后接近触发电平的斜坡曲线是急速上升的,在同样位置同样幅度的干扰脉冲,已不能使开关电源提前截止,从而有效的保证了开关电源稳定的工作。
在SANTAK-C3K(S)机中,逆变驱动电路和PFC驱动电路的结构完全一样,统称驱动电路。驱动电路制作在一块小板上,称为驱动小板,标号为DUR/MODULE。驱动小板的原理图见图7右下所示。
在驱动小板中,由主板开关电源变压器TX201次级送来的开关电源脉冲,经接插件CN13/1、D700送入驱动小板内的开关变压器TX700的初级,次级电压经D701整流、C703、C704滤波,ZD702、ZD703稳压后,产生驱动三极管所需的正负驱动电压。正驱动电压加至上驱动管Q702的集电极,负驱动电压加至下驱动管Q703的集电极,正负驱动电压的公共点,即0点经接插件CN13/9输出作为输出信号的参考点。
图中U701(TLP250)既保证了功率驱动电路与PWM脉宽调制电路的可靠隔离,又具备了直接驱动MOSFET的能力,使驱动电路简化。
TLP250为双列直插8脚封装。其中○1、○4脚为空脚。○2脚为内部发光二极管正极,○3脚为内部发光二极管负极。○8脚为内部上驱动管集电极,○5脚为内部下驱动管的集电极,○6、脚为输出端。
图中R707为消振阻尼电阻,消除电路中的自激振荡因素。R708、R709为自给负偏压电阻。当上驱动管饱和、下驱动管截止时,R708、R709可压低下驱动管发射极电位,使基极电位高于发射极电位,因而使下驱动管可靠截止。同样道理,当上驱动管截止、下驱动管饱和时,R708、R709可抬高上驱动管发射极电位,使基极电位低于发射极电位,因而使上驱动管可靠截止。
图中U701○3脚经接插件CN13/4、CN10/5、R409接地。U701○2脚经接插件CN13/3、CN10/6接至PFC小板上U401输出端○6脚。当U401○6脚为低电平时,内部发光二极管截止,U701○6、○7脚输出为高电平,上驱动管饱和,下驱动管截止,驱动小板输出端经接插件CN13/9 输出高电平。而当U401⑹脚为高电平时,内部发光二极管导通,U701○6、○7脚输出为低电平,上驱动管截止,下驱动管饱和,驱动小板输出端经接插件CN13/9输出低电平。
至此,由驱动小板经接插件CN13/9输出的信号,经过一系列变化,又恢复成CPU○34脚输出的那种幅度恒定,宽度变化的脉冲串了。
由图7可见,市电相线组成的全波整流滤波电路,PFC电路只是控制市电电流的大小,并未切断市电通路,不影响整流电路的基本功能。
驱动小板输出的PFC控制电压送至PFC开关管Q09栅极。由于SANTAK-3CK(S)机的输出功率较大,所以PFC管Q09采用了IGBT管。D20是Q09的加速二极管,使Q09关闭时基极电荷能快速泄放掉。R67可以限制泄放电流的大小。R208、R66为Q09的阻尼电阻,防止Q09可能会产生的自激振荡。R65是栅负压电阻,当Q09截止时,驱动小板输出的是负电压,电流由Q09S极R65Q09G极,在R65上产生S端正G端负的电压,将Q09的G极拉负,使Q09深度截止,消除了误导通的可能性。C59、R126组成Q09和整流模块REC02的吸收电路,用以避免尖峰电压造成的损坏。
图中REC02是桥式整流模块,在这里起极性校正作用,它能够保证无论是输入市电正半周还是负半周,PFC电流都由Q09的D极流向S极。PFC电流的形成参见图6所示。
由于市电输入电路中串有PFC电感L06,所以,控制送入Q09栅极脉冲的宽度,即可控制流过L06电流的大小,使其与输入的市电电压波形保持良好跟踪。同时,也正是因为市电输入回路中串有L06,所以送入由D16、D17构成的全波整流电路中的电压能够高于市电电压,经整流滤波后得到的直流电压也得到提升。我们大家都知道,在正常的情况下,经全波整流和滤波后,只能得到约310V的直流电压。而在C3K(S)机中,经PFC电路升压后可得到约400V的直流电压,两组滤波电容串联后即可得到400V的BUS电压,与升压电路输出的直流电压相当。
在实际工作时,输入的市电电压幅度可能有波动,这将引起BUS电压的波动。为了能够更好的保证电路在市电状态下工作时BUS电压的稳定性,CPU将实时检测BUS电压,以BUS电压幅度的变化来调整CPU○34脚输出的脉冲宽度,从而调整PFC电流的大小,最终使得BUS电压能够保持稳定。

